

西湖大学全球首发机器人动作泛化大模型GAE
作者:互联网
2026-03-27
 AI快讯
AI快讯
西湖机器人公司近日发布革命性人形机器人"泰坦o1",其搭载的GAE动作泛化大模型开创性地实现了机器人动作的通用化控制,标志着智能机器人领域取得重大突破。

这项突破性技术赋予机器人三大核心能力:首先,实现肢体动作的协调统一,改变传统机器人各部件独立运作的局限;其次,具备实时学习能力,面对全新动作指令时无需预先编程;最后,通过现场演示可见,机器人能毫秒级精准复现人类复杂动作,包括手臂摆动、身体旋转及踢球等动作细节。
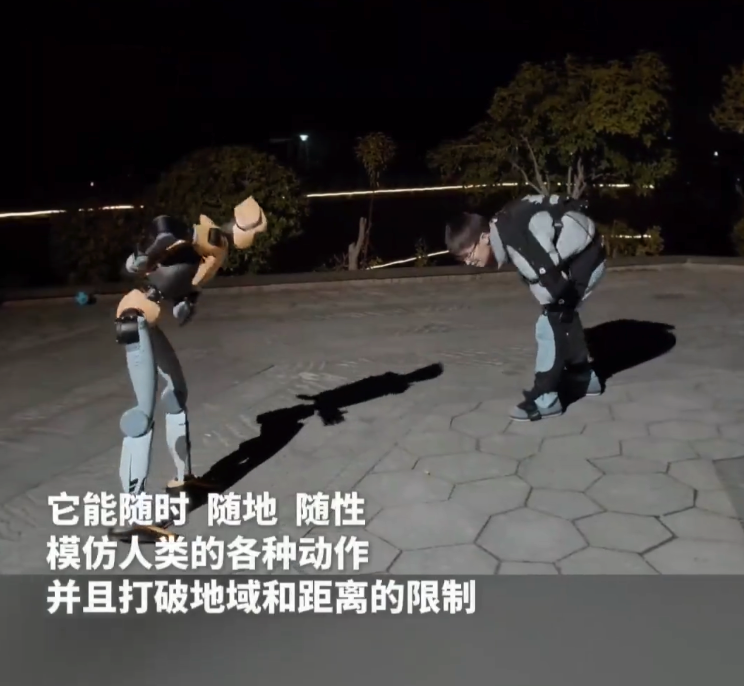
该系统的跨时空操控特性尤为突出,支持单人同步控制分布各地的数百台机器人。研发团队透露,此项技术较国际同类研究领先至少半年。正如ChatGPT实现语言泛化、Sora实现视觉泛化,GAE大模型首次在机器人领域实现了动作行为的泛化处理,为智能机器人发展开辟了新方向。
相关标签:
动作泛化
机器人
大模型
相关推荐

专题
+ 收藏
+ 收藏
+ 收藏
+ 收藏
+ 收藏
最新数据
相关文章
Elasticsearch93新增bfloat16向量支持
03/30
解析OceanBase生态工具链之OAT_obd_OCP_obshell
03/30
贝叶斯不确定性引导的早停框架ESTune与OceanBase校企联合研究
03/30
杈炬ⅵ&浜哄ぇ閲戜粨閫傞厤瀹炴垬锛歋eaTunnel鍦ㄤ俊鍒涙暟鎹钩鍙颁腑鐨勫簲鐢ㄤ笌韪╁潙鎬荤粨
03/30
2026年1月中国数据库流行度排行榜:OB连冠领跑贺新元PolarDB跃居次席显锐气
03/30
社区译文解析FUD与真相MySQL是否真的被弃用了
03/30
英伟达重新规划AI推理加速布局 暂停Rubin CPU转攻Groq LPU
03/30
gpress v1.2.2 全新上线 Web3内容平台迎来更新
03/30
CMake 4.3.0 正式推出
03/30
短剧采用AI换脸技术使角色酷似明星 制作方与播出方构成侵权
03/30
AI精选